Welcome to Huzhou Zhihe Technology Co., Ltd
 Telephone:+86-18906823975
Telephone:+86-18906823975
 E-mail : fonda@zhihe-tech.com
E-mail : fonda@zhihe-tech.com
 Contact Person : Miss Wang
Contact Person : Miss Wang




Welcome to Huzhou Zhihe Technology Co., Ltd
Telephone:+86-18906823975
E-mail : fonda@zhihe-tech.com
Contact Person : Miss Wang

Call: +86-18906823975
Mail: fonda@zhihe-tech.com
Site: No.333 Changhong Middle Street, Fuxi District,Deqing County, Zhejiang Prov., China

Multidimensional force sensor refers to a force sensor that can simultaneously measure force and torque components in more than two directions. In Cartesian coordinate system, force and torque can be decomposed into three components respectively. Therefore, the most complete form of multidimensional force is a six-dimensional force/torque sensor, that is, a sensor that can simultaneously measure three force components and three torque components. The multidimensional force sensor widely used at present is such a sensor.

Compared with single axis force sensor, multidimensional force sensor not only needs to solve the problem of monotony and consistency sensitive to the measured force components, but also needs to solve the problem of inter-dimensional (inter-axis) interference caused by structural processing and process errors, dynamic and static calibration, decoupling algorithm and circuit realization in vector operation, etc. We have thoroughly solved the scientific problems in the research of multi-dimensional force sensors, such as the structural design of elastomer, mechanical property evaluation, vector decoupling algorithm, etc., and also mastered the core manufacturing technology, with the design and processing ability from macro machinery to micro machinery. The products cover a full range of 2-D to 6-D multidimensional sensors, ranging from hundreds of grams to dozens of tons, and obtained a number of patented technologies in elastomer structure and vector decoupling circuit.

Multi-dimensional force sensors are widely used in the research of robot fingers and PAWS. Robot surgery research; Finger force study; Dental research; Force feedback; Brake detection; Precision assembly, cutting; Restoration research; Plastic surgery research; Product testing; Tactile feedback; Teach and learn. The industry covers the fields of robotics, automobile manufacturing, automated assembly line, biomechanics, aerospace, textile industry and so on.

The multi-dimensional force sensor can simultaneously detect three force information in three-dimensional space (Fx, Fy, Fz), through which the control system can not only detect and control the grip force of the robot hand's claw, but also detect the weight of the grasp object, as well as whether there is sliding and vibration during the grasp operation. There are two kinds of 3D finger force sensor: side mount and top mount. Side mount 3D finger force sensor is generally used for two-finger robot gripper, and top mount 3D finger force sensor is generally used for robot multi-finger dexterous hand.
The multi-dimensional force sensor is an important sensor of intelligent robot, which can detect the full force information in three-dimensional space (Cartesian coordinate system) at the same time, that is, three force components and three torque components.
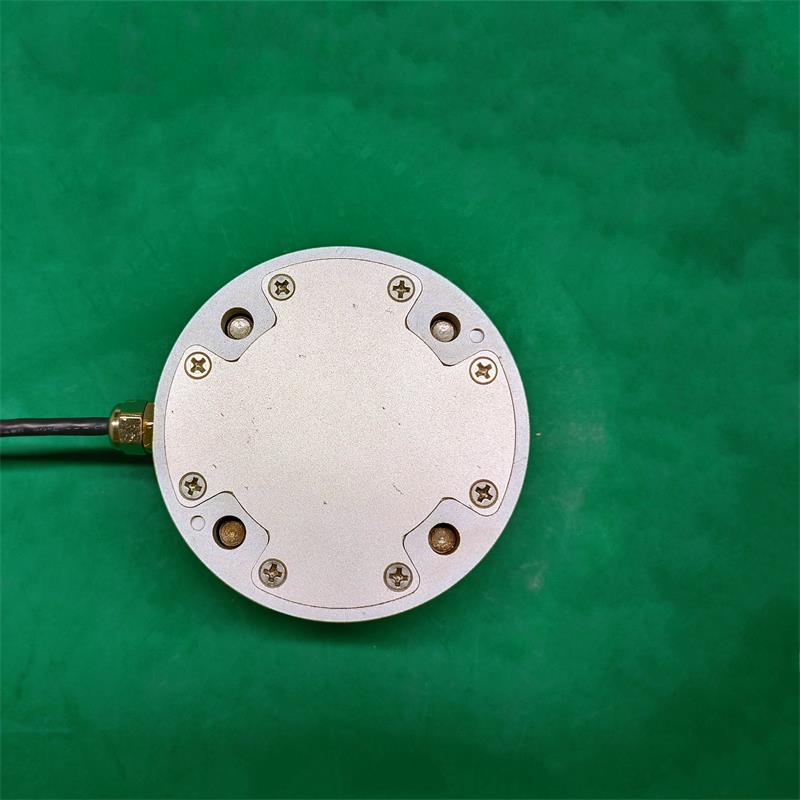
Sensor elastomer adopts patented structure, high sensitivity, good rigidity, small dimensional coupling, mechanical overload protection function. The integrated decoupled bridge signal is synthesized into six components in three-dimensional space, which can be directly used for force control. Standard serial port and parallel port input and output. The product can be combined with the control computer to form a two-stage computer system, and can also be connected to the terminal to form an independent test device.


Scan to learn more




